
주요 연구 목표 및 내용
LiDAR + CCTV 기반 주차장의 진입 진출차량을 인식하여 차량의 누락없는 주차장 업무를 지원하기 위한 시스템
총 연구기간
2020.11 ~ 2022.10발주처
중소벤처기업부공동연구개발기관
단독주요 연구 목표 및 내용
LiDAR + CCTV 기반 주차장의 진입 진출차량을 인식하여 차량의 누락없는 주차장 업무를 지원하기 위한 시스템
총 연구기간
2020.12 ~ 2022.11발주처
중소벤처기업부공동연구개발기관
UFM, 보고넷, 윌아이텍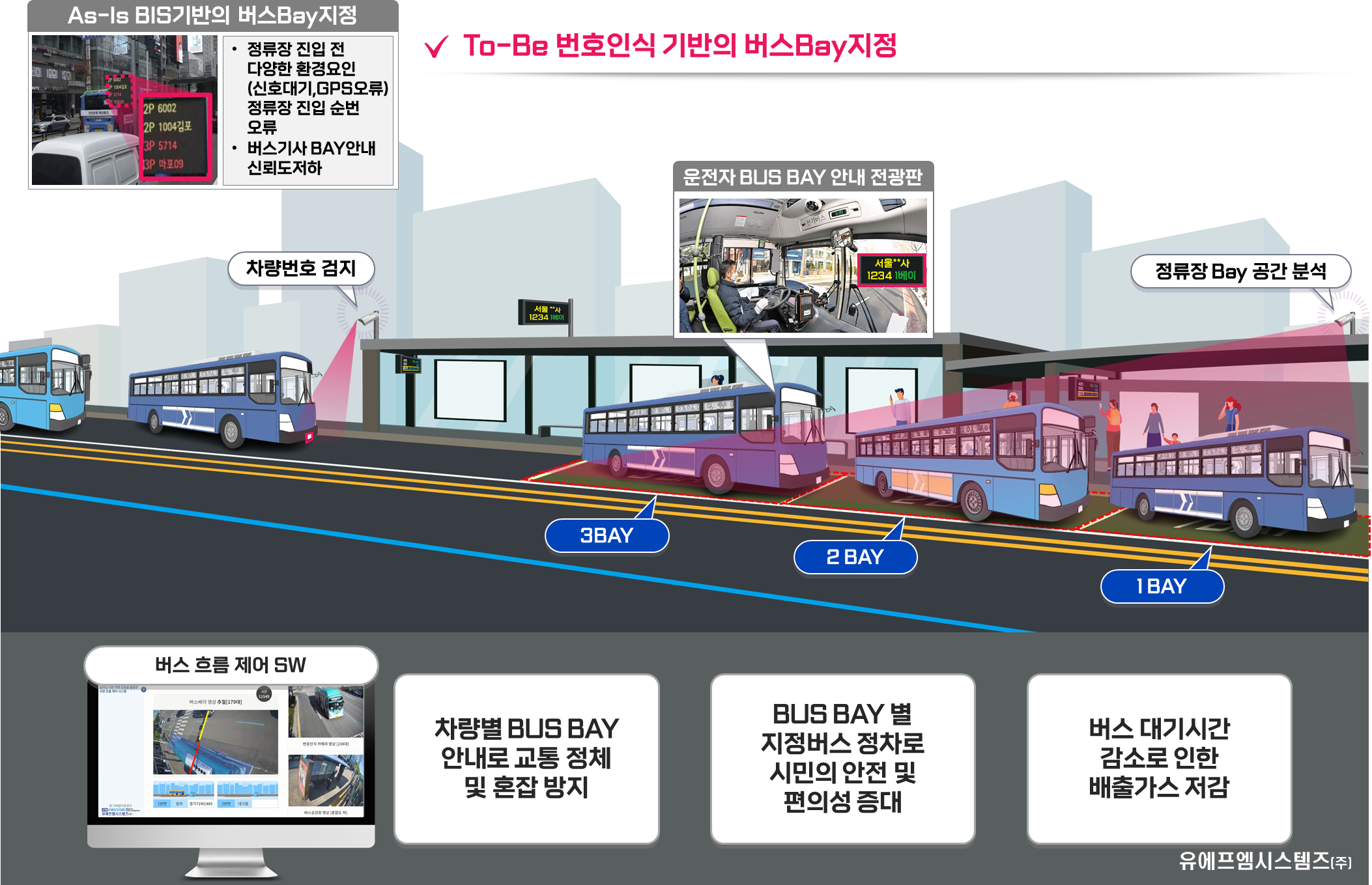
주요 연구 목표 및 내용
교차로의 차량흐름을 CCTV로 분석하여 신호체계와 연동함으로써 혼잡도를 분산
총 연구기간
2020.12 ~ 2022.11발주처
중소벤처기업부공동연구개발기관
UFM, 보고넷, 윌아이텍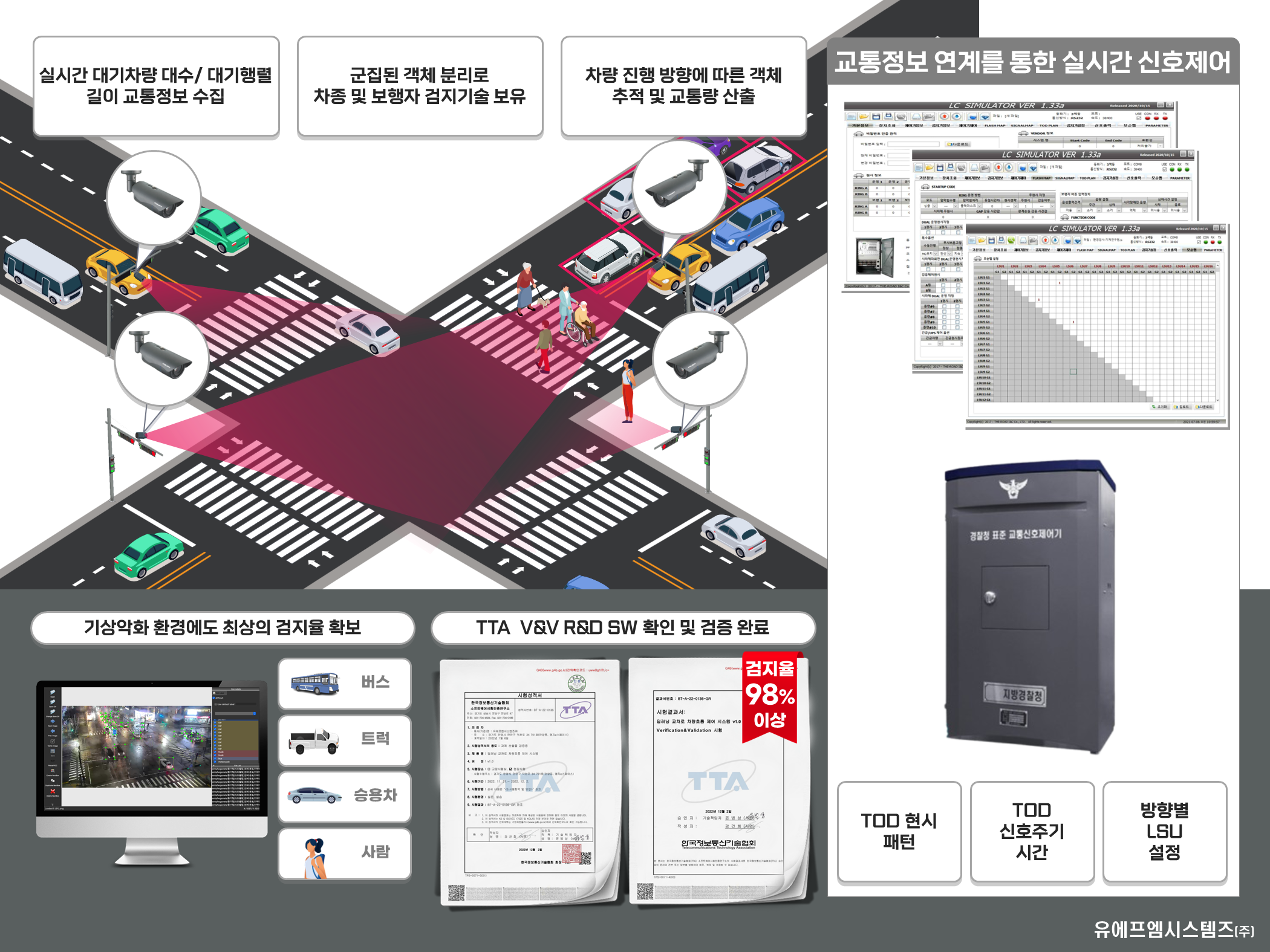
주요 연구 목표 및 내용
버스 정류장의 진입로 인근을 CCTV 로 분석하여 진입하고 있는 차량에게 안내함으로서 정차 지점을 유도하고 아울러 버스정류장 내에 승객에게 안내함으로써 버스 승강장의 혼잡도를 개선함
총 연구기간
2020.05 ~ 2022.12발주처
경기도공동연구개발기관
단독
주요 연구 목표 및 내용
좌회전감응기술 : 도로교통공단 ‘대체검지기 성능시험’ 인증 평가 참여 및 인증서 획득
ㆍ좌회전 대기열 30미터 자동 감응 후 좌회전 신호 변경 체계 개발
ㆍLiDAR를 이용한 검지 정확도를 98% 이상으로 추출 기능 개발
횡단보도검지기술 : 사용성 평가를 위한 도로교통공단 성능평가 참여 및 평가 적합판정서 획득
ㆍ횡단보도 보행신호 점멸 시 아직 객체가 다수 존재하는 경우 보행신호 연장 체계 개발
ㆍLiDAR를 이용한 검지와 카메라의 객체인식 정확도를 획기적 개선 체계 개발
총 연구기간
2020.04 ~ 2023.12발주처
NIPA공동연구개발기관
UFM, KC 미래기술, 에이아이웍스
주요 연구 목표 및 내용
금속 주물공장의 안전사고를 CCTV를 이용하여 감지하여 쓰러짐, 달림, 부딫힘, 끼임 등에 대한 사고를 분석하여 사고 발생이 예측되는 상황에서 알람과 경광등을 이용한 경고를 함으로써 안전사고를 사전에 예방하고자 함
© UFMSYSTEMS. All Rights Reserved.